
- МС uln2003 схема подключения и управление шаговым двигателем полное руководство
- МС uln2003 схема подключения и управление шаговым двигателем
- Подключение шагового двигателя 28BYJ-48
- Описание и особенности шагового двигателя 28BYJ-48
- Необходимые материалы и инструменты для подключения шагового двигателя
- Схема подключения шагового двигателя 28BYJ-48 к МС uln2003
- Управление шаговым двигателем с помощью МС uln2003
- Режимы управления шаговым двигателем
- Подключение МС uln2003 к микроконтроллеру
МС uln2003 схема подключения и управление шаговым двигателем полное руководство
Шаговый двигатель – это устройство, которое используется для организации точного вращения или перемещения. Одним из наиболее популярных типов шаговых двигателей является двигатель с магнитными отталкивающими шаговыми транзисторами, который также называется управляющей микросхемой ULN2003.
ULN2003 – это микросхема, которая состоит из внешних транзисторов, организованных в последовательной схеме. Когда на каждую управляющую точку подается последовательность сигналов, микросхема возвращает точность и стабильность движения шаговых двигателей.
Давайте рассмотрим схему подключения шагового двигателя с использованием микросхемы ULN2003. На схеме видно, что микросхема подключена к шаговому двигателю через провода питания и управления. Каждая управляющая точка подключена к соответствующему выводу микросхемы ULN2003.
Включение и управление шаговым двигателем с помощью ULN2003 требует использования библиотеки customstepper. Библиотека customstepper позволяет настроить тип двигателя, частоту вращения и другие параметры для достижения требуемой функции двигателя. Когда эти параметры установлены, можно начать управление двигателем.
МС uln2003 схема подключения и управление шаговым двигателем
Двигатель с шаговым режимом вращения отличается от обычного бесколлекторного двигателя тем, что его вращение осуществляется пошагово. Каждый шаг двигателя соответствует определенной позиции, и точность его позиционирования зависит от количества шагов, которые он способен сделать за один оборот.
Для управления шаговым двигателем с помощью микросхемы ULN2003 необходимо установить соответствующую схему подключения. Сначала стоит знать, что ULN2003 имеет восемь выходных транзисторов, которые могут управлять четырьмя обмотками двигателя.
Схема подключения выглядит следующим образом:
- Подключите к выводам микросхемы ULN2003 обмотки двигателя. Например, обмотки A и C подключите к выводам 1 и 2, а обмотки B и D – к выводам 3 и 4.
- Подключите сопротивление в 200-300 Ом к базам транзисторов микросхемы ULN2003.
- Подключите управляющую плату или другое устройство к выводам микросхемы ULN2003 через резисторы.
Теперь, когда схема подключения готова, можно приступить к управлению двигателем. Для этого достаточно изменить состояние выходных транзисторов микросхемы ULN2003.
Микросхема ULN2003 имеет два режима работы: полного и половинного шага.
В режиме полного шага микросхема ULN2003 делает один шаг за каждое изменение состояния входных сигналов управления. Это означает, что для одного полного оборота двигателя необходимо совершить определенное количество шагов. Число шагов зависит от конкретного двигателя и указано в его технических характеристиках.
В режиме половинного шага микросхема ULN2003 делает полшага за каждое изменение состояния входных сигналов управления. Это позволяет достичь более высокой точности позиционирования, но требует большего числа шагов для выполнения одного оборота.
Для управления двигателем в режиме полного шага выходы микросхемы ULN2003 должны быть подключены к входам управления двигателя в определенной последовательности. Например, для двигателя с четырьмя обмотками последовательность коммутации может быть следующей: 1-2-3-4-1 и так далее.
Для управления двигателем в режиме половинного шага последовательность коммутации будет другой и зависит от конкретного двигателя. Для достижения максимальной точности позиционирования рекомендуется использовать таблицу коммутации, которая указывает необходимую последовательность включения обмоток.
Важно знать, что скорость вращения двигателя зависит от частоты сигналов управления, подаваемых на микросхему ULN2003. Чем выше частота, тем быстрее будет вращаться двигатель. Однако стоит учитывать, что при высоких частотах сигналов могут возникнуть проблемы с нагрузкой и точностью позиционирования.
В данной статье были рассмотрены основные аспекты подключения и управления шаговым двигателем с помощью микросхемы ULN2003. Если вы хотите подробнее изучить данную тему или узнать о других методах управления двигателем, рекомендуется обратиться к дополнительным источникам информации.
Подключение шагового двигателя 28BYJ-48
Шаговые двигатели 28BYJ-48 являются однополярными, имеют четыре катушки и обеспечивают 4096 шагов на один оборот. Каждая катушка имеет два полюса, и к ним подключаются провода.
Для подключения шагового двигателя 28BYJ-48 к микросхеме ULN2003 необходимо выполнить следующие действия:
- Против каждой катушки шагового двигателя подводится напряжение через соответствующую линию микросхемы ULN2003.
- Провода шагового двигателя соединяются с соответствующими выводами микросхемы ULN2003.
Входы микросхемы ULN2003 управляются с помощью микроконтроллера или другого устройства управления. Для управления шаговым двигателем с помощью микросхемы ULN2003 используется последовательность входных сигналов.
Посмотреть последовательность входных сигналов можно в таблице ниже:
| Входы | Шаговые двигатели |
|---|---|
| IN1 | 28BYJ-48 |
| IN2 | 28BYJ-48 |
| IN3 | 28BYJ-48 |
| IN4 | 28BYJ-48 |
Микросхема ULN2003 возвращает шаговые двигатели в исходное положение, поочередно подавая сигналы на входы IN1-IN4. Каждая последовательность входных сигналов соответствует одному шагу шагового двигателя.
Для управления шаговым двигателем 28BYJ-48 через микросхему ULN2003 можно использовать программы, написанные на различных языках программирования. В зависимости от частоты и последовательности сигналов можно регулировать скорость и направление движения шагового двигателя.
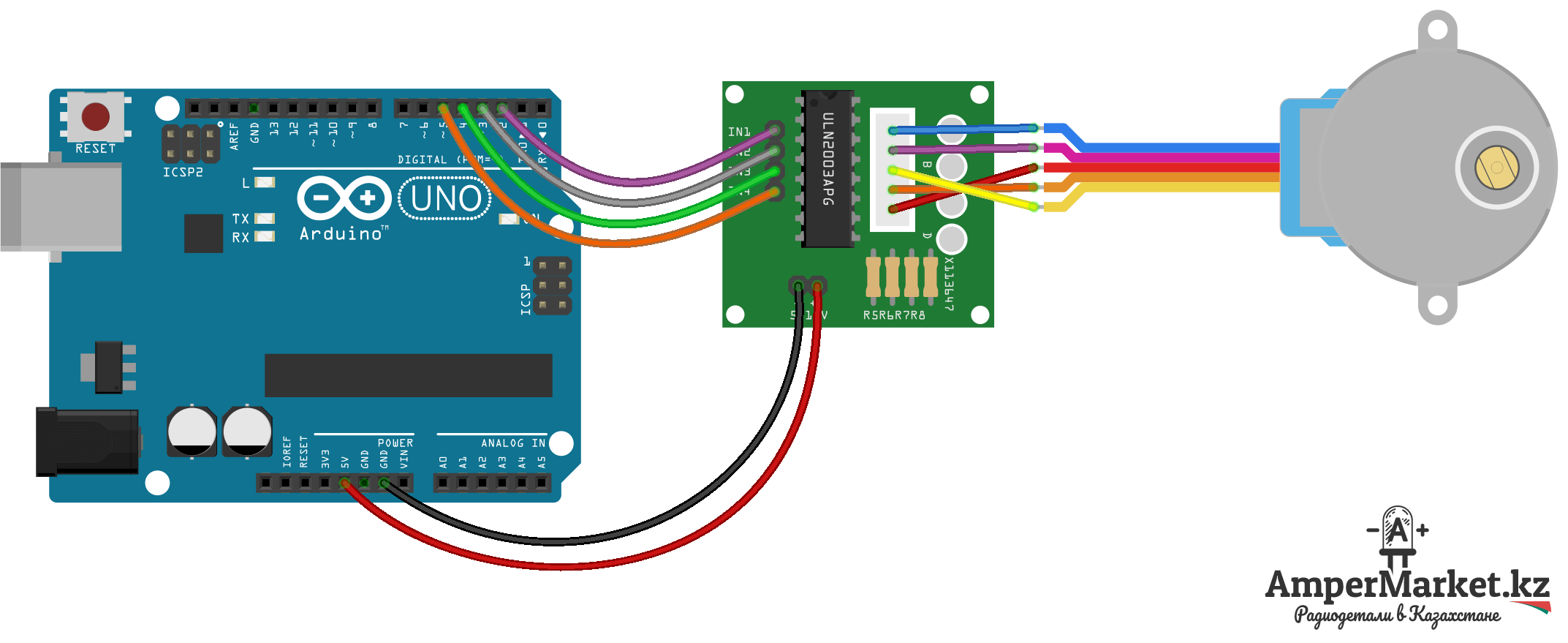
Для подключения шагового двигателя 28BYJ-48 к микросхеме ULN2003 и управления им можно использовать следующую схему:

Для подключения компонентов схемы можно использовать провода с разъемами, чтобы облегчить процесс подключения и отключения.
Для проверки правильности подключения проведите прозвонку проводов между соответствующими выводами микросхемы ULN2003 и катушками шагового двигателя 28BYJ-48.
После подключения шагового двигателя 28BYJ-48 и микросхемы ULN2003 к микроконтроллеру или другому устройству управления можно приступить к программированию и управлению двигателем.
Видно, что подключение шагового двигателя 28BYJ-48 к микросхеме ULN2003 не представляет большой сложности. С помощью данного подключения и управляющей программы можно реализовать различные движения и изменять характеристики двигателя в зависимости от требований проекта.
Описание и особенности шагового двигателя 28BYJ-48
Шаговый двигатель 28BYJ-48 имеет 4 фазы и 8 полных шагов. Каждый полный шаг состоит из 8 микрошагов, что дает 32 шага на оборот. Двигатель управляется с помощью сигналов на его входах, которые указывают, в каком направлении и на сколько шагов он должен переместиться.
В шаговом двигателе 28BYJ-48 используется микросхема ULN2003 в качестве драйвера. Микросхема позволяет управлять двигателем, подавая на его входы последовательность сигналов, которая заставляет ротор двигаться. Микросхема ULN2003 подключается к мотору и управляет его фазными обмотками.
Для подключения шагового двигателя 28BYJ-48 к микросхеме ULN2003 необходимо правильно расположить перемычку на плате микросхемы. Перемычка позволяет выбрать режим работы – полношаговый или полушаговый. В полношаговом режиме двигатель делает один шаг за каждую команду управления, а в полушаговом режиме – половину шага. Перемычка должна быть установлена в соответствии с требуемым режимом работы.
Особенностью шагового двигателя 28BYJ-48 является внутренний редуктор, который позволяет увеличить крутящий момент двигателя. Благодаря этому, двигатель способен выдерживать нагрузку и обеспечивать плавное движение.
Для управления шаговым двигателем 28BYJ-48 можно использовать различные технические решения. Например, можно написать программный код с помощью библиотеки для Arduino, которая позволяет управлять двигателем с помощью команд по серийному порту. Также можно использовать специальный контроллер, который управляет двигателем по командам, полученным от внешнего устройства.
В итоге, шаговый двигатель 28BYJ-48 является достаточно простым и недорогим устройством, которое можно использовать в различных проектах. Он позволяет управлять положением ротора с высокой точностью и обеспечивает плавное движение при изменении напряжения и тока питания.
Необходимые материалы и инструменты для подключения шагового двигателя
Для подключения шагового двигателя с использованием микросхемы ULN2003 вам потребуются следующие материалы и инструменты:
- Шаговый двигатель: выберите шаговый двигатель с подходящим количеством ступеней и характеристиками для вашего проекта.
- Микросхема ULN2003: это специальная микросхема, которую будем использовать для коммутации шагового двигателя.
- Провода: вам понадобится немного проводов для подключения шагового двигателя к микросхеме ULN2003.
- Инструменты: для сборки и подключения схемы вам понадобятся обычные инструменты, такие как пинцет, паяльник, паяльная паста и припой.
Все необходимые материалы и инструменты, которые мы перечислили выше, можно легко найти в специализированных магазинах электроники или заказать онлайн.
Теперь, когда у вас есть все необходимое, давайте подключим шаговой двигатель с помощью микросхемы ULN2003.
Схема подключения шагового двигателя 28BYJ-48 к МС uln2003
Для управления шаговым двигателем 28BYJ-48 мы можем использовать МС uln2003. Это интегральная схема, которая позволяет подключить шаговой двигатель без необходимости использования большого количества проводов и драйверов.
Шаговой двигатель 28BYJ-48 имеет четыре катушки, каждая из которых может быть подключена к МС uln2003. Когда мы подаем на входные пины uln2003 напряжение, соответствующее позиции ротора, мы сможем управлять двигателем.
МС uln2003 имеет встроенный драйвер, который принимает импульсы от контроллера и преобразует их в напряжение, необходимое для работы двигателя. Данная схема осуществляет работу с шаговыми двигателями типа 28BYJ-48, которые являются самыми популярными и наиболее доступными.
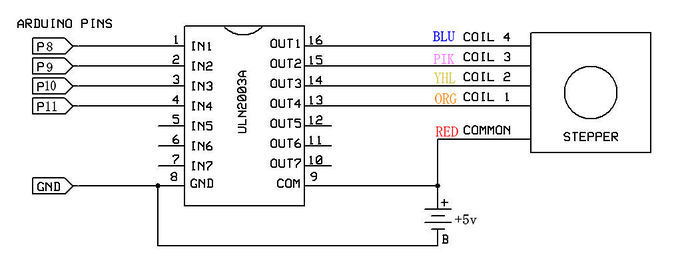
Для начала подключения шагового двигателя 28BYJ-48 к МС uln2003, мы должны подключить каждую катушку двигателя к выходным пинам uln2003. Здесь наиболее важные пины uln2003: IN1, IN2, IN3 и IN4. Каждый из них должен быть подключен к одной из катушек двигателя.
Подключение происходит следующим образом:
- IN1 – катушка 1
- IN2 – катушка 2
- IN3 – катушка 3
- IN4 – катушка 4
После подключения катушек к МС uln2003, мы можем начать управление двигателем. Для этого мы можем использовать библиотеку Stepper, которая входит в состав Arduino IDE.
Пример кода для управления двигателем:
#include <Stepper.h>
const int stepsPerRevolution = 2048; // количество шагов на один оборот двигателя
// Указываем пины подключения МС uln2003
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// Ничего не нужно делать в данном блоке
}
void loop() {
// Поворачиваем вал двигателя на 1 оборот в одну сторону
myStepper.setSpeed(60); // Скорость вращения вала двигателя (оборотов в минуту)
myStepper.step(stepsPerRevolution);
// Задержка 1 секунда
delay(1000);
// Поворачиваем вал двигателя на 1 оборот в другую сторону
myStepper.setSpeed(60);
myStepper.step(-stepsPerRevolution);
// Задержка 1 секунда
delay(1000);
}В данном примере мы поворачиваем вал двигателя на один оборот в одну сторону, затем в другую сторону, с задержкой в 1 секунду между поворотами.
Таким образом, мы получим замедление вращения вала двигателя 28BYJ-48, что называется шаговым режимом работы. В данном режиме мы можем точно контролировать положение вала двигателя.
Важно помнить, что МС uln2003 не предоставляет возможность контролировать скорость вращения вала двигателя. Поэтому, если вам необходимо управлять скоростью вращения, вам может потребоваться использовать другой тип драйвера или модуля.
Управление шаговым двигателем с помощью МС uln2003
Для реализации управления шаговым двигателем можно использовать микросхему uln2003. Эта микросхема представляет собой набор ключей, которые позволяют контролировать вращение двигателя.
Для подключения шагового двигателя к микросхеме uln2003 необходимо соединить его катушки с выходными контактами микросхемы. Напрямую подключать двигатель без использования дополнительных компонентов не рекомендуется, так как это может привести к его перегреву.
Для нашего примера мы будем использовать двигатель 28BYJ-48-5V, который имеет 4 катушки и 5 контактов. Чтобы организовать управление двигателем, мы подключим каждую катушку к одному из выходов микросхемы uln2003.
Количество импульсов, которое необходимо подать на катушку для получения одного полного оборота двигателя, зависит от его типа. Для 28BYJ-48-5V это число равно 4096. Таким образом, для того чтобы сделать один полный оборот, мы должны выделить 4096 точек и поочередно подключать к ним катушки.
Для организации движения двигателя мы будем использовать следующую схему:
| Выход микросхемы uln2003 | Катушка двигателя |
|---|---|
| 1 | 1 |
| 2 | 3 |
| 3 | 2 |
| 4 | 4 |
Таким образом, для того чтобы двигатель повернулся на один шаг, мы должны подать на выход микросхемы uln2003 соответствующий сигнал. При этом правило для двигателей 28BYJ-48-5V будет следующее:
- Если мы хотим, чтобы двигатель вращался в одну сторону, то мы должны подавать на выходы микросхемы сигналы в следующей последовательности: 1, 3, 2, 4.
- Если мы хотим, чтобы двигатель вращался в другую сторону, то мы должны подавать на выходы микросхемы сигналы в следующей последовательности: 4, 2, 3, 1.
Важно отметить, что при использовании шагового двигателя в режиме бесколлекторного двигателя, мы не сможем точно контролировать его положение. Однако, мы сможем контролировать количество импульсов, которое мы подаем на катушку, и таким образом, выделить точки, в которых мы хотим, чтобы двигатель останавливался.
Подключение шагового двигателя к МС uln2003 позволяет управлять его вращением и контролировать его положение. Благодаря использованию этой микросхемы мы можем сделать полное руководство по управлению шаговым двигателем.
Режимы управления шаговым двигателем
Для управления шаговым двигателем с использованием микросхемы ULN2003 необходимо организовать подключение и выбрать соответствующий режим работы. В нашем случае, мы будем использовать полное руководство для управления шаговым двигателем с помощью данной микросхемы.
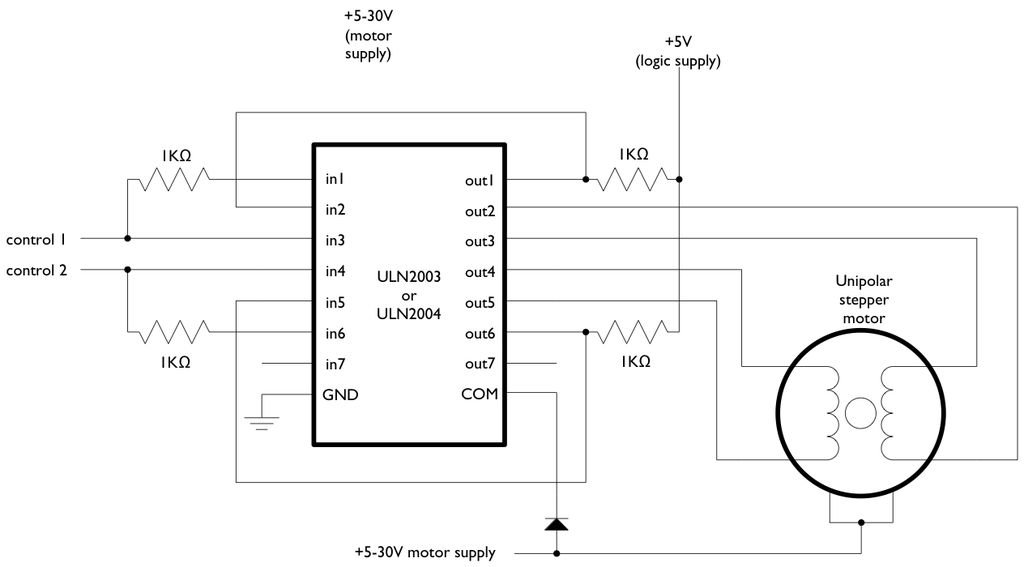
Шаговый двигатель имеет четыре фазных обмотки, и поэтому может быть управляем вращением в двух направлениях: по часовой стрелке и против часовой стрелки. В данном устройстве микросхема ULN2003 будет использоваться в качестве драйвера для управления шаговым двигателем.
Для работы микросхемы ULN2003 необходимо подключить ее к питанию. Подключение осуществляется через 5 проводов: два для питания (VCC и GND) и три для управления (IN1, IN2 и IN3).
В нашем случае, для управления шаговым двигателем подключена микросхема ULN2003. Микросхема имеет 7 выходных линий, каждая из которых подключена к соответствующей обмотке двигателя. При подаче сигнала на одну из линий, соответствующая обмотка активируется, вызывая вращение вала двигателя.
Разберемся подробно схеме подключения и режимам управления шаговым двигателем:
1. Полное вращение
В этом режиме управления, все выходные линии микросхемы подключены к соответствующим обмоткам двигателя, и при подаче сигнала на каждую линию, соответствующая обмотка активируется. Это позволяет двигателю вращаться на 360 градусов в одну сторону или в другую, в зависимости от последовательности коммутации.
2. Последовательная коммутация
В этом режиме управления, активируются поочередно соседние фазы двигателя, что позволяет достичь более плавного вращения. Для этого необходимо подключить только две выходные линии микросхемы к обмоткам двигателя. Последовательная коммутация позволяет уменьшить количество проводов и токов, необходимых для управления двигателем.
В обоих режимах управления двигателем, можно задать количество оборотов или перемещение в определенную позицию с помощью программного управления. Для этого можно использовать специальные библиотеки источники, которые позволяют управлять шаговыми двигателями.
Так-как в нашем устройстве микросхема ULN2003 подключена к шаговому двигателю, мы можем использовать ее для организации работы двигателя и управления его вращением в нужном направлении. При этом необходимо учитывать нагрузку на валу двигателя и подбирать соответствующие токи для обмоток, чтобы не перегружать двигатель и обеспечить его нормальную работу.
Подключение МС uln2003 к микроконтроллеру
Для управления шаговым двигателем с помощью МС uln2003 необходимо выполнить правильное подключение к микроконтроллеру. Микросхема uln2003 позволяет управлять шаговыми двигателями без необходимости использования драйверов, что делает ее очень удобной для подключения к различным платформам.
В данном случае рассмотрим подключение МС uln2003 к платформе Arduino. Для начала, необходимо подключить выходные контакты uln2003 к обмоткам шагового двигателя. Обмотки двигателя обычно имеют четыре контакта, которые называются A, A’, B и B’. Каждая обмотка должна быть подключена к соответствующим выходам uln2003.
Также, для правильного подключения необходимо знать, какие контакты uln2003 отвечают за коммутацию фазных обмоток. Эти контакты обычно имеют названия IN1, IN2, IN3 и IN4. Управление коммутацией можно осуществить с помощью последовательности переключения этих контактов. Разберемся, как это делается.
Для подключения uln2003 к Arduino, необходимо использовать транзисторы. Один из самых популярных шаговых двигателей – 28byj-48-5v, подключается следующим образом:
IN1 – контакт Arduino
IN2 – контакт Arduino
IN3 – контакт Arduino
IN4 – контакт Arduino
Таким образом, подключение uln2003 к Arduino осуществляется через транзисторы, которые позволяют управлять коммутацией фазных обмоток шагового двигателя. В результате, при передаче соответствующих сигналов в контакты uln2003, получим вращение ротора двигателя.
Для управления шаговым двигателем с помощью uln2003 и Arduino можно использовать различные программы и библиотеки. Например, библиотека Stepper позволяет легко управлять шаговыми двигателями с помощью Arduino. Примерно следующая последовательность команд в программе Arduino может быть использована для организации вращения шагового двигателя:
1. Подключаем библиотеку Stepper:
#include <Stepper.h>
2. Определяем количество шагов и контакты uln2003:
const int stepsPerRevolution = 200;
Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);
3. Определяем функции для вращения в одну и другую стороны:
void rotateClockwise() {
myStepper.setSpeed(60);
myStepper.step(stepsPerRevolution);
}
void rotateCounterClockwise() {
myStepper.setSpeed(60);
myStepper.step(-stepsPerRevolution);
}
4. В основной программе вызываем функции для вращения двигателя:
void loop() {
rotateClockwise();
delay(1000);
rotateCounterClockwise();
delay(1000);
}
Таким образом, подключение МС uln2003 к микроконтроллеру позволяет управлять шаговыми двигателями без необходимости использования дополнительных драйверов. Правильное подключение и управление uln2003 позволяет получить точное и плавное движение ротора шагового двигателя.







